筋力測定とトレーニングの総合システム
三菱電機運動療法システム ストレングスエルゴ

ストレングスエルゴ8の仕様
基本仕様
|
医療機器の類別
|
整形用機械器具のうち、理学療法用器械器具
|
|---|---|
|
医療機器の一般的名称
|
能動型展伸・屈伸回転運動装置
|
|
販売名
|
ストレングスエルゴ
|
|
型名
|
BK-ERG-121
|
|
医療機器製造販売承認番号
|
21900BZX00988000
|
|
高度管理医療機器の別
|
管理医療機器
|
|
クラス分類
|
II
|
|
特定保守管理医療機器の別
|
該当
|
一般仕様
|
電源
|
AC100V 50/60Hz 350VA
|
|---|---|
|
使用温度
|
5~35℃
|
|
使用湿度
|
30~85%RH 但し結露なきこと
|
|
保存温度
|
0~50℃
|
|
保存湿度
|
30~95%RH 但し結露なきこと
|
|
電撃に対する保護形式
|
クラスI
|
|
電撃に対する保護程度
|
B形機器
|
|
準拠規格
|
JIS T 0601-1、JIS T 0601-1-2(EMC適合)
|
|
耐用期間
|
7年[自己認証(当社データ)による]
|
機械仕様
|
外形寸法
|
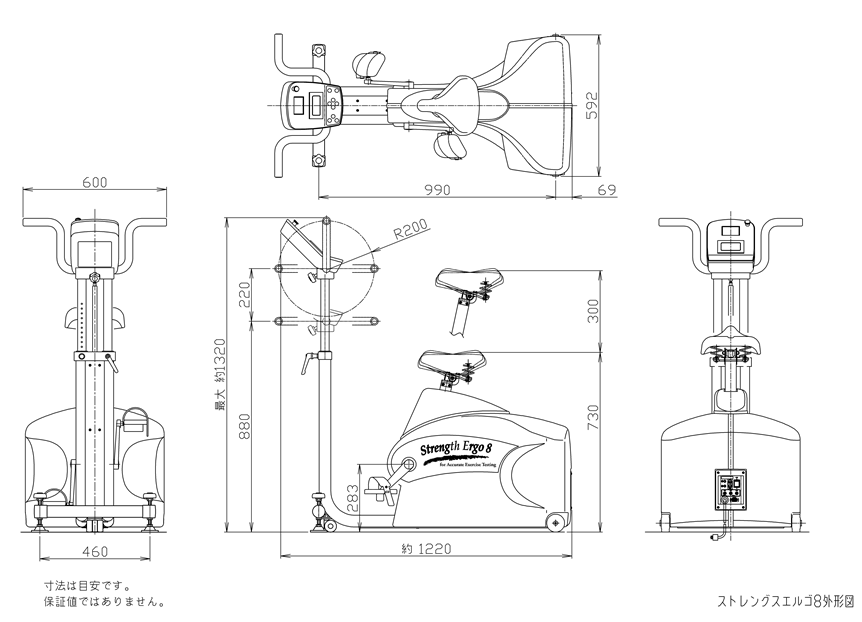
1220(L)×600(W)×1320(H)mm
|
||
|---|---|---|---|
|
重量
|
約95kg(本体) 電源ケーブル長 5m
|
||
|
ペダル部
|
クランク長さ
|
170mm
|
|
|
ペダル間隔
|
216mm
|
||
| ペダル | ストラップ付きペダル | ||
| ハンドル | 回転 | 30degごとに固定 手動 半径 200mm | |
| 上下調節範囲 |
880mm~1100mm 20mmピッチ
手動 床面からハンドル中心
|
||
| サドル部 | 上下調節範囲 |
750mm~1080mm
電動 床面からサドル天面
|
|
|
適用範囲
|
許容身長
|
140~200cm(個人差があります)
|
|
|
許容体重
|
135kg | ||
|
安全対策 |
エンジン部(上部) | 保護カバー | |
| アシスト使用時 | 緊急停止ボタン | ||
|
その他の
本体フレーム
|
保護カバー
過走防止装置
|
||
運動仕様
|
ワット制御モード
(ワット一定) |
負荷設定範囲
|
-50~600W(運動負荷試験時) ※1
|
|---|---|---|
|
-50~400W(連続運動時)
|
||
| 回転速度制御範囲 | 10~115rpm | |
| 下限は設定可能 | ||
|
負荷精度
(60rpm ※5 以下)
|
-50~200W±3W ※2 | |
| 200~400W±6W | ||
| 400~600W±12W | ||
|
等速度制御モード
(速度一定) |
設定速度範囲
|
10~110rpm
|
| トルク上限240N・m | ||
| 速度安定制御±3%(F/S) | ||
|
トルク制御モード
(トルク一定) |
負荷設定範囲
|
0~96N・m(連続運動時)
|
|
回転速度範囲
|
10~115rpm
下限は設定可能
|
|
| 負荷精度 ※5 |
0~20N・m±0.6N・m
20~96Nm±3%
|
|
|
アシスト
(メカによる
ペダリング補助)
|
速度設定範囲
|
5~50rpm
|
|
トルク設定範囲
|
5~50N・m ※3
|
|
| モード移行 |
ペダル踏み込みにより各運動モードに
ダイナミックに移行する
|
|
|
正回転、逆回転反転機能
|
有
|
|
|
ペダル角度分解能
|
1deg ※4
|
|
|
消費カロリー分解能
|
0.01kcal
|
|
- ※1 20W/分のランプ負荷時に実施可能な最大負荷(50rpm以上)
- ※2 負荷をマイナスに設定した場合、ペダルは他動で動作します。
- ※3 設定値はペダルが足を押し上げるパワーの最大値となります。
- 設定値はペダルが足を押し上げるトルクの最大値となります。
- ※4 ペダル角度原点は手動設定です。
- ※5 負荷精度の保証は正回転時のみです。
外形図