プレスリリース

プレスリリース
<広報>
2022年9月26日
移動計測によりリアルタイムで自己位置推定と3D環境地図作成を実現
モバイル3Dスキャナ「Field LiDAR® FZ-1000」を発売
三菱電機エンジニアリング株式会社(本社:東京都千代田区、社長: 永友
秀明)は、SLAM技術※1を活用し、移動計測※2により自己位置推定と3D環境地図作成を同時に実現できる、モバイル3Dスキャナ「Field
LiDAR(フィールドライダー) FZ-1000」を9月27日に発売します。
本製品は、移動しながら計測することで、広範囲かつリアルタイムに点群データを取得でき、自然災害の被害状況を把握するための災害査定や工事現場の土量、出来形計測、森林管理やインフラ点検など、速やかな状況把握による作業効率化が図れます。これにより、防災減災・建設現場での課題解決に貢献します。
- ※1 Simultaneous Localization and Mapping:自己位置推定とマッピングを同時に行う技術
- ※2 計測範囲は半径100m以内。計測時間は10分間以内。移動速度は歩行速度相当の時速4㎞以内

本製品の特長
- 1.SLAM技術とセンサフュージョンにより、高精度な自己位置推定と3D環境地図生成を実現
- ・移動計測することで、高精度な自己位置推定と広範囲の3D環境地図生成を容易に実現
- ・本体内蔵の高精度IMU※3やRTK-GNSS※4など複数のセンサーを融合したセンサフュージョンにより、計測の安定性や精度(±50mm)を向上
- ・GNSSを受信出来ない場所でも、SLAM技術により3D環境地図の生成が可能
- ※3 3軸の角速度と加速度を計測するセンサー
- ※4 RTK-GNSSとは基準局の補正データを使用し、より高精度に位置情報を取得する衛星利用技術
- 2.リアルタイム計測処理により、計測作業を効率化
- ・RTK-GNSS連携により複雑な計算を必要とする座標変換など、本体でリアルタイム処理が可能※5
- ・手間のかかる標定点設置や測量等の事前作業と座標変換等の後作業が不要となり、作業の効率化を実現
- ※5 GNSS補正信号サービス等との連携が必要
- 3.分かりやすい情報提供により、現場の状況把握の効率化を支援
- ・高感度カメラとの連携によるリアルタイム処理を行うことで、計測後すぐに高密度な3D点群ビューア等で自然災害の被害状況等の状況把握が可能。
- 現場確認作業の効率化を支援
発売の概要
| 製品名 | 型名 | 発売日 | 本体価格(税抜) | 販売目標台数 |
|---|---|---|---|---|
| Field LiDAR | FZ-1000 | 2022年9月27日 | オープン価格 | 30台/年 |
発売のねらい
近年、自然災害の多発による被害現場の迅速な状況把握や災害査定をはじめ、労働力不足による土木工事や森林管理やインフラ点検などの作業効率化が求められています。
当社は、高感度カメラや3Dレーザスキャナ関連の製品開発・販売を行っており、公共施設などの幅広い分野で採用されています。
今回、これまで培った技術を集約し、移動計測するだけで容易に自己位置推定と3D環境地図作成を同時に実現する、モバイル3Dスキャナ「Field
LiDAR FZ-1000」を発売します。これにより、防災減災・建設現場での課題解決に貢献します。
今後の予定
今後、「Field LiDAR」製品において、長距離計測版等のラインアップ拡充を目指していきます。
システム構成例
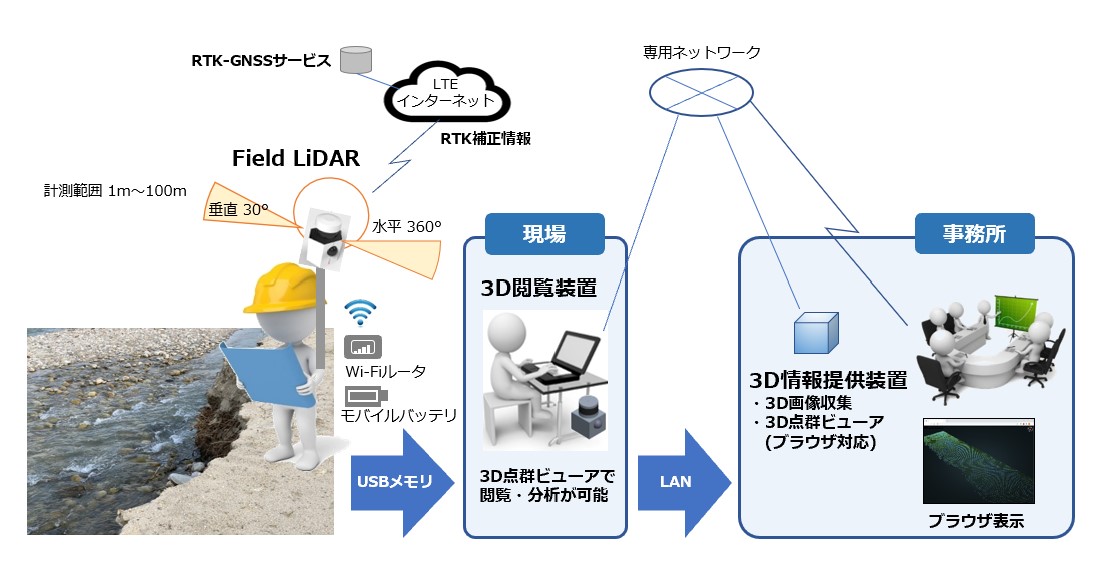
| 基本構成 | 拡張構成 |
|---|---|
| (1)計測装置 ①Field LiDAR FZ-1000本体 ②モバイルバッテリ (2)3D閲覧装置 ①高性能ノートPC ②専用アプリ(3D環境地図生成用) ③3D点群ビューア ④USBメモリ ⑤Wi-Fiルータ(SIM含まず) (3)付帯 ①背負子・一脚 ②キャリングケース |
(1)3D情報提供装置 ①サーバPC ②3D点群ビューア(ブラウザ対応) |
3D点群ビューア表示
「Field LiDAR FZ-1000」によって、高密度にカラー点群データが取得できます。
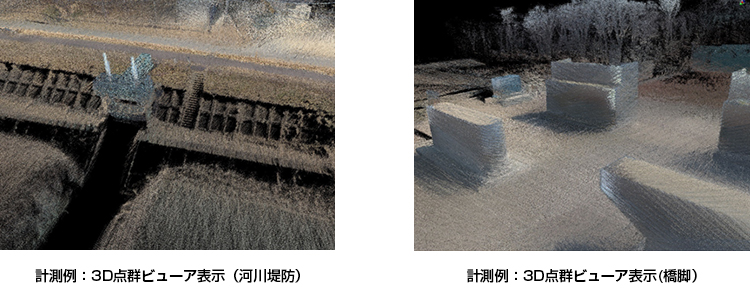
計測使用例

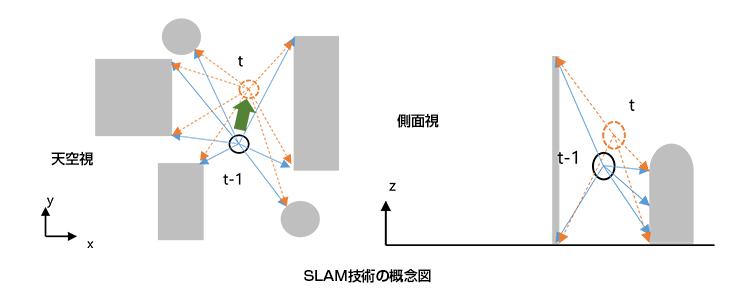
「SLAM技術」について
LiDAR SLAM技術の原理(下図参照)は、「Field LiDAR」を持って実線から点線に移動しながら周囲の環境をセンシングし、周囲の環境における多数のランドマーク(特徴点)を抽出します。さらに、時間経過した移動箇所からのランドマークとの変移により自己位置を推定し、その情報に基づき3D環境地図の生成を同時に実行します。
主な仕様
「Field LiDAR FZ-1000」本体
| 項目 | 仕様 | |
|---|---|---|
| 計測仕様 | 計測概要 | ① 計測距離 半径1~100m範囲 ② 計測方法 移動計測(手持ち、背負子、他) |
| 計測処理 | ① 取得方法 リアルタイム点群生成SLAM処理(スイッチ押下し測定開始/完了) ② データ種類 色点群マップ※6、軌跡データ※7 ③ データ形式 LAS形式(binary) ④ 計測精度 ±50mm ⑤ 計測時間 1~10分/回 ⑥ データ保存容量 約16時間(内蔵ストレージSSDに保存) |
|
| ユーザーI/F | LiDAR仕様 | ① 計測範囲 半径1~100m、水平360°、垂直30° ② レーザクラス Class1 |
| GNSS仕様 | ① GNSS GPS/GLONASS/Galileo/Beidou/QZSS ② 対応バンド L2OF,L2C,E1B/C,B2I,E5b,L1C/A,L1OF,B1I ③ RTK-GNSS処理 (補正信号受信時) |
|
| IMU仕様 | ① 姿勢角精度 0.1°(MEMS-IMU内蔵、X,Y,Z,Roll,Pitch,Yaw) | |
| カメラ仕様 | ① 超広角レンズ搭載 フルHDカメラ 2式搭載 ② 最低被写体照度 0.5lx |
|
| 通信仕様 | Wi-Fi通信 | IEEE802.11b/g準拠(2.400-2.4835GHz) |
| 構造仕様 | 質量 | 約2.5kg |
| 外形寸法 | 約187(レンズ含)(W)×238(アンテナ含)(H)×178(D)mm | |
| 材質 | 外装(GNSSアンテナカバー):樹脂 外装(その他)、内装:アルミニウム合金 |
|
| 耐環境仕様 | 動作温度範囲 | -10℃~+40℃ |
| 保管温度 | -10℃~+60℃ | |
| 動作湿度範囲 | 10~90%RH(結露なきこと) | |
| 保護等級 | JIS C 0920 IP43 | |
| 電源仕様 | 電源入力 | DC15~19V (モバイルバッテリより給電) |
※6 色情報が付与された3次元復元データ。GNSSデータによる平面直角座標化済み
※7 測定時に本装置が移動した軌跡の3次元データ
商標関連
Field LiDARは三菱電機エンジニアリング株式会社の登録商標です。
特許関連
計4件 出願中
製作担当事業所
三菱電機エンジニアリング株式会社 メディアシステム事業所
お客様からのお問い合わせ
三菱電機エンジニアリング株式会社
営業統括部 営業第一部 監視制御システム営業課
〒102-0073 東京都千代田区九段北1-13-5 ヒューリック九段ビル 電話:03-3288-1108
報道機関からのお問い合わせ先
三菱電機エンジニアリング株式会社
総務・法務部 総務グループ
電話(03)3288-1101
